- Портал про RPA")
DIY: Blinky — простой светодиодный робот. Пошаговая инструкция по созданию
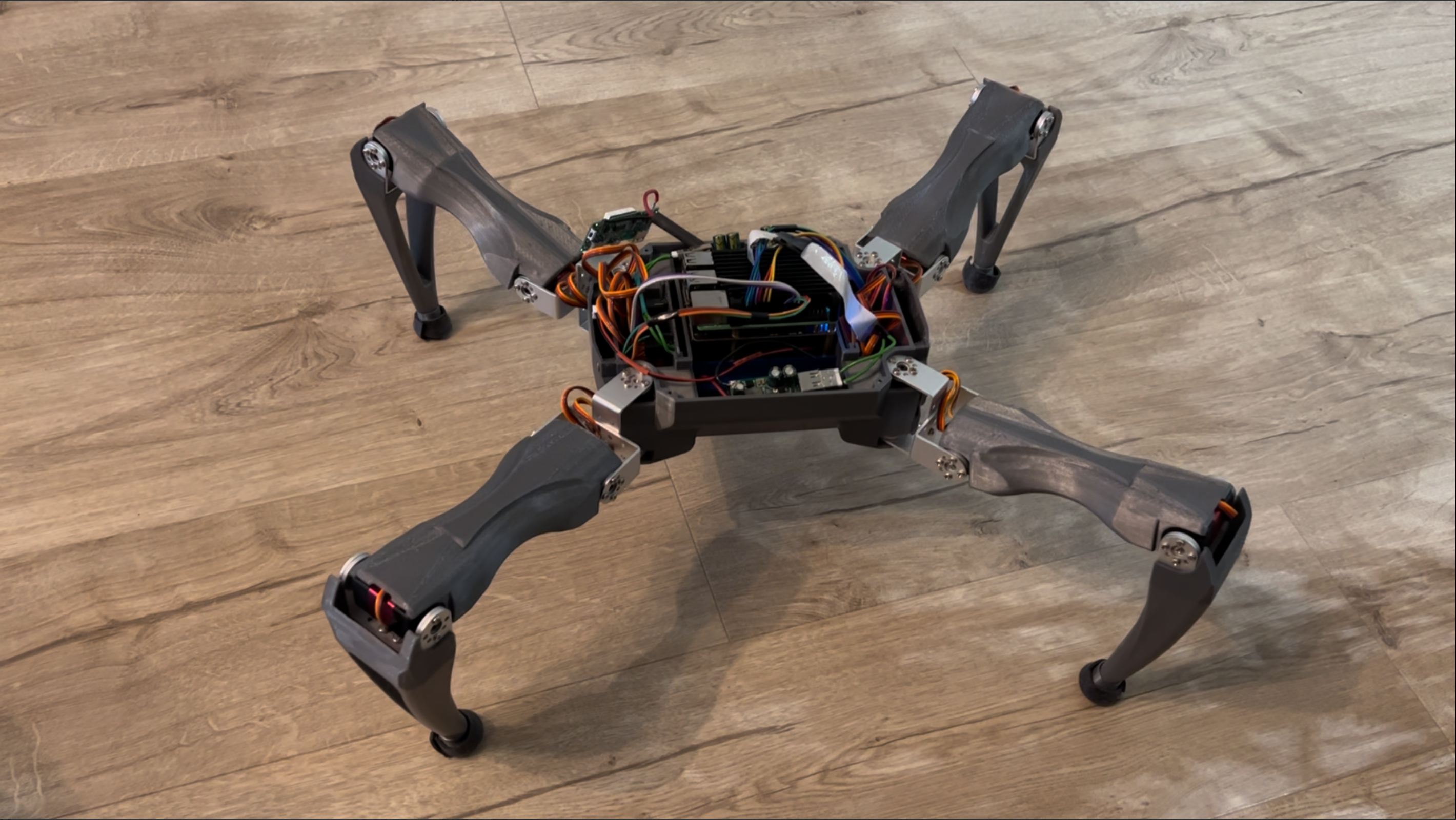
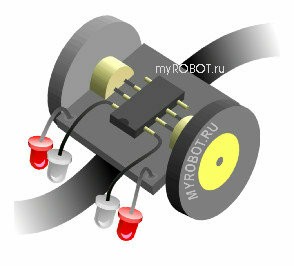
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии. Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов.

![[LEGO Самоделки] Metal Gear Rex (Крутой робот из простых деталей лего) ПОДРОБНАЯ ИНСТРУКЦИЯ](https://myrobot.ru/articles/images/beam/intro1.jpg "Что представляет собой промышленная робототехника")









Робототехника для детей. Содержание Современное образование и роботы Важность робототехники и ее польза Литературное и научное происхождение Робототехника и история Типы роботов Разделение роботов по способам перемещения По типу управления Дошкольная работа Mindstorms EV3. Робототехника — это техническое творчество, первый шаг к изобретательской, конструкторской и рационализаторской деятельности. Это освоение начал механики, схемотехники, электроники, а также программирования. Это не просто кружок по интересам — это целое течение, которое собирает вокруг себя единомышленников, помогает обмениваться опытом и находить друзей, увлечённых тем же, что и ты. Занимаясь конструированием роботов дети развивают внимательность, аккуратность, дисциплину, воображение, ответственность, и конечно же, учатся работать в дружной и слаженной команде.
- Его величество робот
- Россия , г. Москва , ул.
- Введение : Blinky — робот, работающий на основе светодиодов. Его движущей силой является потребность в общении с людьми.
- Давненько хотел собрать робота. Самого простого, который только и умеет, что ходить по нарисованной чёрной линии.
- Собираем простого робота, который движется как рак - Lobsterbot
- Поиск новой работы для большинства людей является пугающим испытанием.
- На предыдущих уроках мы установили среду Кумир , настроили ее для дальнейшей работы и научились задавать стартовую обстановку Робота. Теперь перейдем непосредственно к составлению алгоритмов для Робота с использованием простых команд.
- Робототехника опирается на такие дисциплины, как электроника , механика , кибернетика , телемеханика , мехатроника [ 4 ] , информатика , а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную военную, космическую, подводную робототехнику.
- Во все времена человечество сталкивалосьс инновациями, которые кардинально меняют жизнь. В наше время в связи с ускорением научно — технического прогресса такие ситуации возникают чаще.
- Тренажер предназначен для отработки практических навыков в рамках программы первичной аккредитации по специальности "Терапия" для станции "Экстренная медицинская помощь" и имеет следующие технические характеристики:. Тренажер позволяет произвести оценку состояния пациента на первоначальном этапе и отработать навыки экстренной помощи:.
- Подробная видео инструкция как сделать робота на ардуино: простой робот с видео камерой, объездом препятствий и функциями распознавания, управляемый с персонального компьютера или ноутбука с любой точки мира с помощью программы для управления роботами Arduino Robot Control. Робот собран на основе одного из самых дешевых DIY конструкторов, который я нашел на алиэкспресс, в основе управления Arduino совместимая плата Wemos D1 на базе ESP


Как сделать робота самому в домашних условиях. Электроника, логические микросхемы, аналоговые роботы. BEAM произносится бим является отличной школой робототехники и электроники, так как позволяет вести освоение шаг за шагом, от простого к сложному. От создания роботов с простейшими рефлексами до систем, управляемых нейронными сетями. При создании BEAM-существ широко применяются аналоговые технологии, позволяющие реализовать разновидности нечеткой логики, и нейронная поведенчески-ориентированная архитектура систем управления, основанная на стимул-ответных реакциях.