§5.7. Способы управления исполнительными двигателями постоянного тока
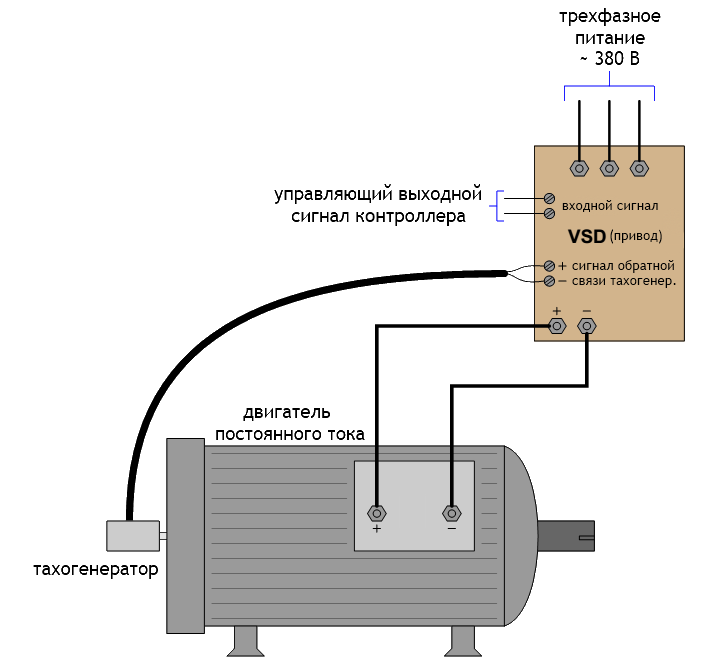
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки. Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания. Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока.









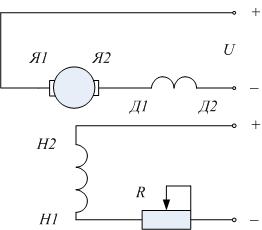
В качестве исполнительных двигателей систем автоматического управления используют в основном машины постоянного тока с независимым возбуждением. Для регулирования угловой скорости ротора исполнительных двигателей постоянного тока используют два основных вида управления:1 непрерывное — изменением во времени амплитуды напряжения; 2 импульсное — изменением времени, в течение которого к двигателю подводится номинальное напряжение. Напряжением управления может быть напряжение на обмотке якоря якорное управление или на обмотке возбуждения главных полюсов полюсное управление.







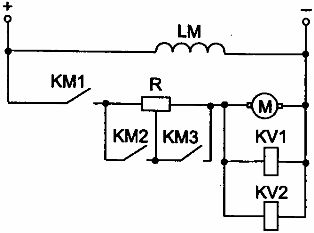
База знаний Избранные статьи Эксплуатация электрооборудования Электроснабжение Электрические аппараты Электрические машины Электропривод Электрическое освещение. Школа для электрика в Telegram. Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления.